Spherebot Controller: Open Hardware Advent Calendar Day 15
Today’s entry isn’t quite done yet, but that’s only because I completely blanked on getting the rest of the parts when I was at the store on Saturday. Oops.
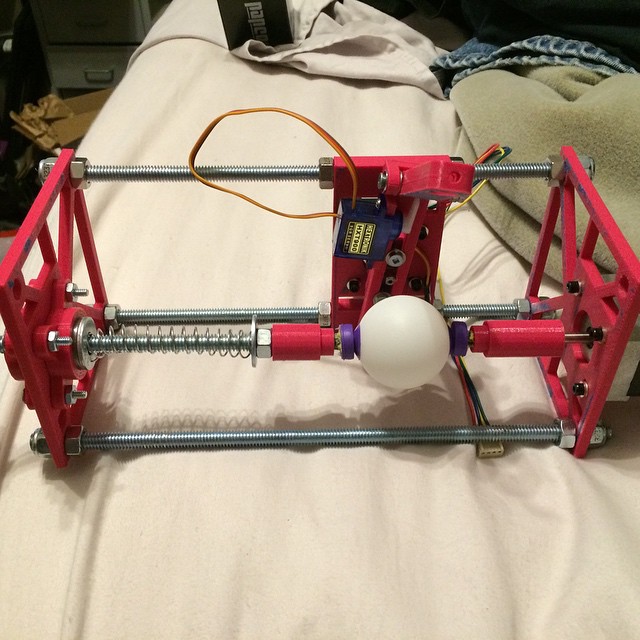
It’s a controller board for the Spherebot.
Overview
The Spherebot is an alternative design to EMSL’s EggBot. It’s meant to be cheaper, maybe a bit more hackable, and perhaps made out of 3D printed parts.
I want to take this opportunity right off the top: if you’ve got the resources, I highly suggest buying one of EMSL’s offerings. They’re open-source, and very well designed and made. EMSL do VERY good work.
We, however, didn’t want to spend a ton for screwing around with drawing on ping pong balls, and wanted something more hackable, so a Spherebot it is. One problem, though, was the lack of a controller board - the “official” site just uses a breadboard. That doesn’t cut it with us, so we came up with our own design.
Hardware
The design is very basic - an ATMega328P with a couple of Pololu stepper driver modules, a servo output, a crystal, and some connectors. Two stepper connectors, one for +12V and +5V in, and one FTDI-type serial connector.
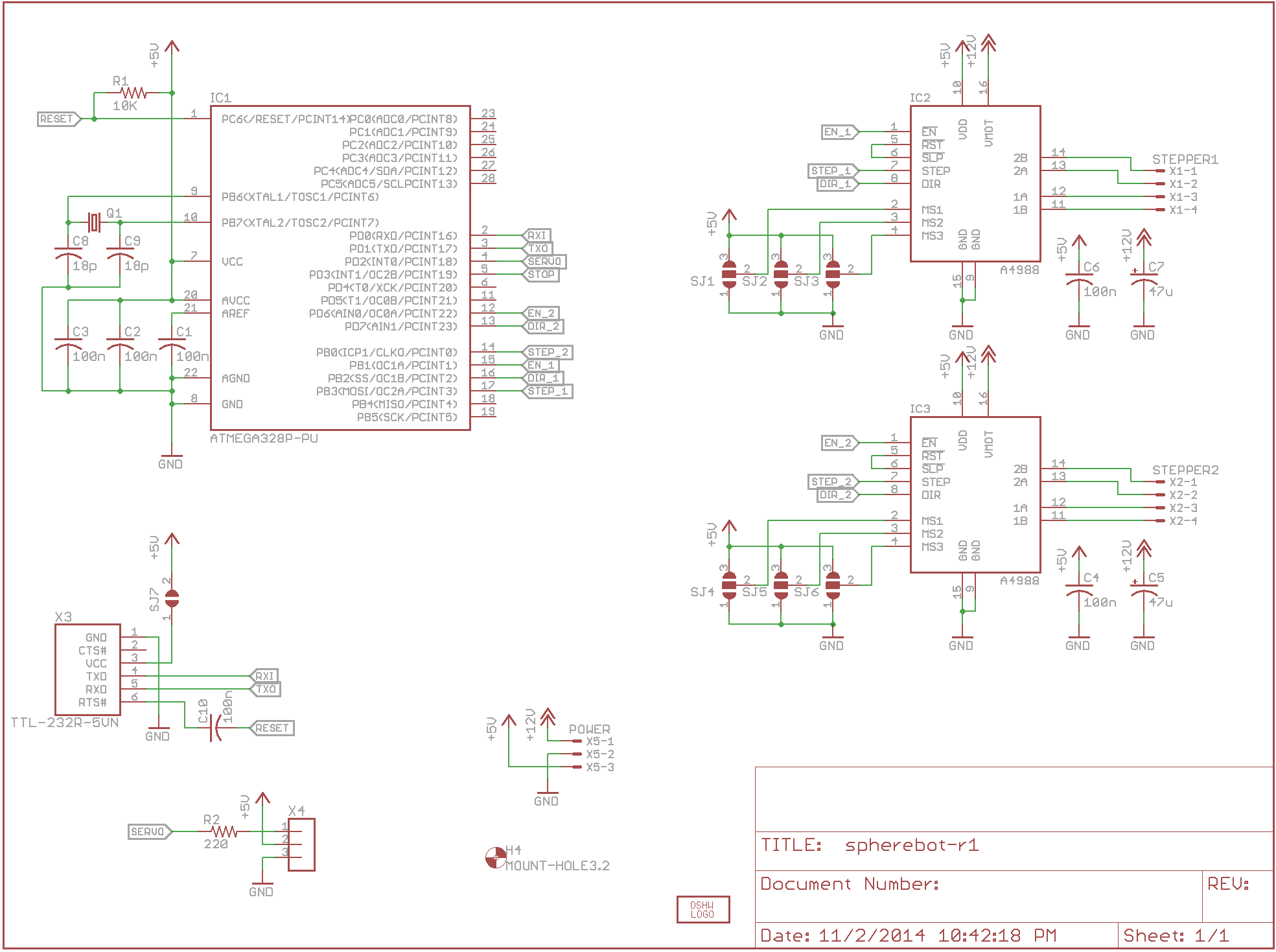
Power is provided by an ATX power supply, and the serial to USB interface will be done with our USB Wildcard board from earlier. All of this is to keep this board as basic as possible.
Schematic and PCB design files can be found on our GitHub.
Future plans
I’m currently working on building a Spherebot that will use this board.
I hope to finish that up over my Christmas break from work. I’ll be posting more details on how we built it, along with a parts list and how to get the thing going, because that information seems to be a bit hard to find. This board might also feature prominently in a planned project for the DIYPinball project - a simple board for controlling two stepper motors is a useful thing to have lying around.
Conclusion
Not an exciting one today, but hopefully something that other people interested in making Spherebots will find useful.